![]()
项目历史
不伤草坪的四轮驱动,前驱动桥的开发
活跃在草坪上的乘用割草机,轮胎总要是在草坪上行走。
两轮驱动情况下,不局限于急加速和急停车,多少都会损伤草坪。四驱车在转弯的时候也非常容易对草坪进行损伤。草坪剪割的很平整,轮胎却损伤了草坪。为此我们开发了不损伤草坪的液压四轮液压驱动前桥(HFWD)。
旋转性能的特征
包含割草机在内通常的拖拉机四驱构造,前后桥采用驱动轴联接,前后轮的速度比固定。直线行驶的时候没有问题,转向时后轮的旋转半径和前轮的旋转半径比根据方向盘角度随机变化,前后轮回转速比固定的情况下,很难实现平稳转向。
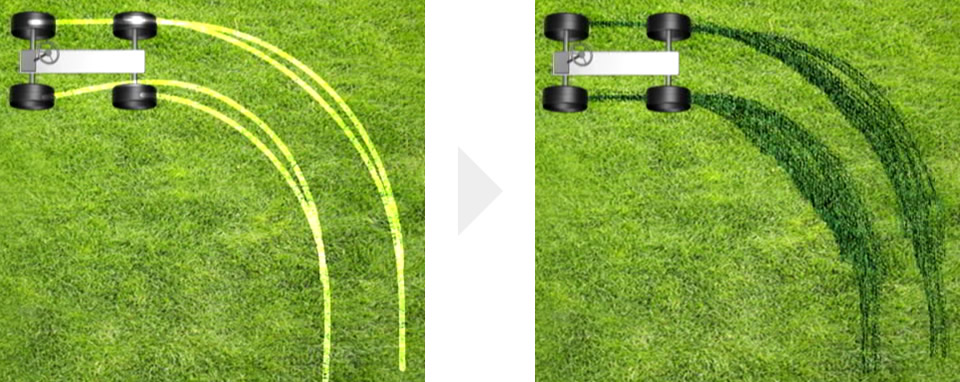
如图2所示,旋转半径比与回转速度比的差异轮胎发生侧滑,导致草坪损伤。在保证四驱行走性能前提之下要实现平稳转向,需要保证前后轮其中一方的回转速度比伴随方向盘的角度进行相对变化。
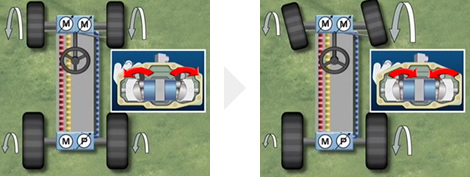
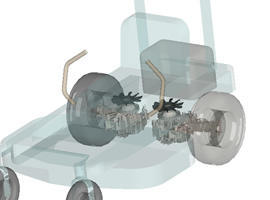
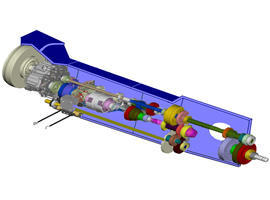
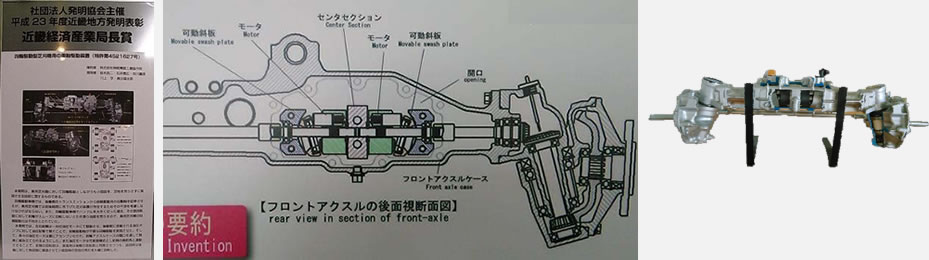
图3:液压泵和液压马达组合的后驱动桥与配置双马达的前驱动桥通过配管直列连接的四驱案例。
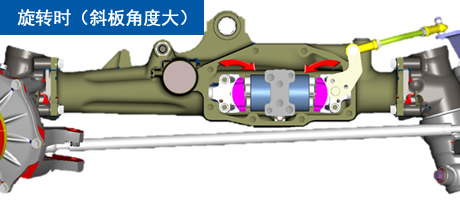
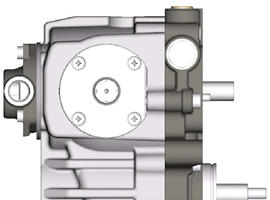
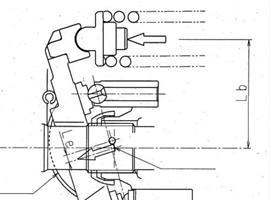
液压四驱用前桥(HFWD),如图4所示旋转时,可变马达的斜板角与转向角连动变化,后轮和前轮的回转速度比根据回转半径的变化可以适时调整最佳配比。
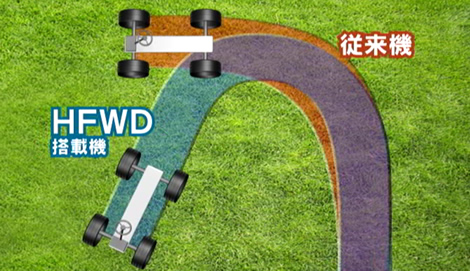
其结果,如图5所示,一般机型相比可以实现平稳,小半径回转。
前后轮回转速度比的影响
但是当前轮的回转速度大于后轮的时候,前后轮动力通过路面进行循环,要注意会消耗更多的动力。
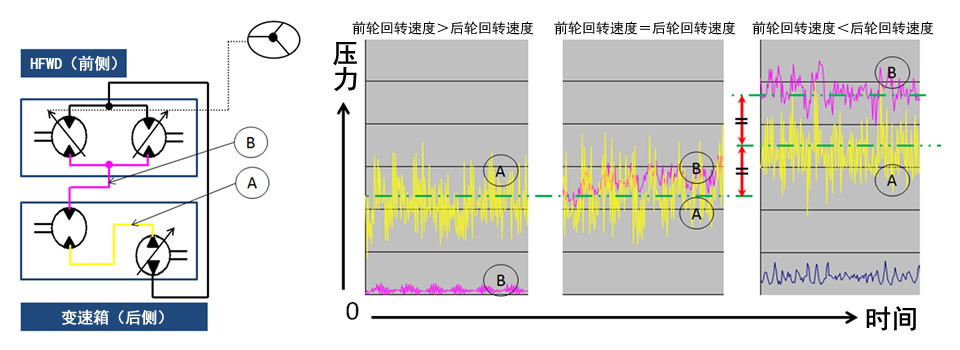
图6的压力波形显示,当设定前轮大于后轮转速的时候,测定位置A与测定位置B的压力发生逆转现象。
本来压力波形(左)所示压力车辆可以行走,压力波形(右)所示前轮的回转速度设定大于后轮的回转速度时,压差高,动力发生浪费。
相对于后轮回转速度前轮回转速度大的时候,行走压力逐渐升高。后轮与前轮转速一致的情况下如压力波形(中)所示,A与B点的测试压力一致。
这种状态下不发生动力循环有一个临界点,A和B点的测试压力波形图,左侧图A点压力与中间的一致。也就是说前后桥直列结合的的液压四驱系统,前后轮回转速度设定需要保持一致还是前轮速度低于后轮速度才可以。
HFWD的液压可变马达斜板角的调整,由于前轮转速可以自由进行设定,如果前路的速度过低,B点会产生负压,所以必须设定一定的变化范围。
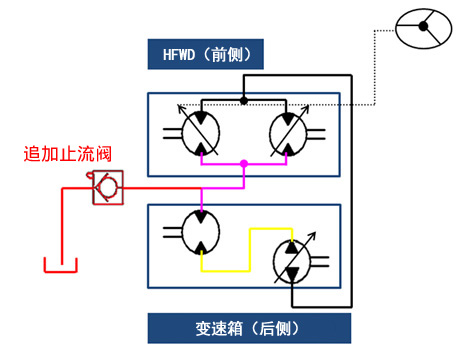
轮胎气压的状态,车体重心的变化都影响轮胎有效驱动半径,前后速比的容易发生变化。我们可以调整的转速比范围也会很小,需要一台一台的精密调整。如图7所示,在前后桥液压回路上设置止流阀。这样前轮回转速度过度降低的时候也不会发生负压,其结果,回转速比可以较宽范围进行设定,大幅提高生产性能。
无驱动轴的优点
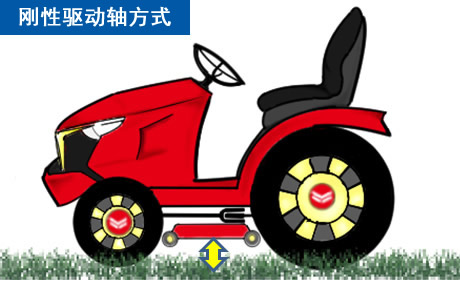
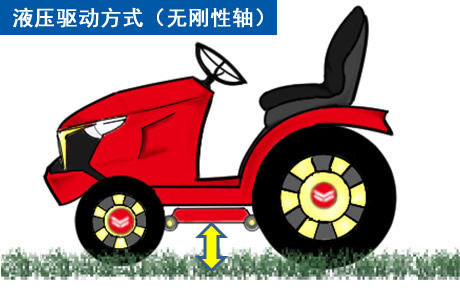
小型车辆(图8左)通过刚性轴连接的情况下,割草装置上升的空间得到限制,在非作业行走时,割草装置很容易会碰到障碍物。 液压驱动四驱取消了刚性轴,通过油管连接(图8右),割草装置的上升空间得到提升。同时现有的2轮驱动小型车辆很容能够变更为4轮驱动形式。
完
欧洲丘陵地比较多,四驱车辆的需求也高,保证优异行驶性能阿克曼式液压驱动前桥(HFWD)非常受欢迎。在欧洲的农机展会上,我们客户的机器在泥地和坡地上做了体验展示。将来我们将致力开发这样的让客户喜爱的产品。